Goal-Driven Autonomy in Dynamic Environments
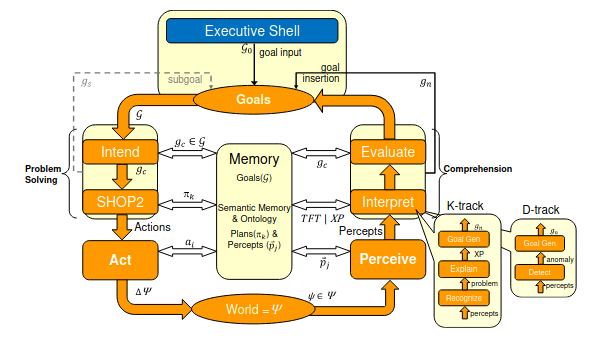
Dynamic environments are complex and change in often unexpected ways. Given such an environment, many autonomous agents have difficulty when the world does not cooperate with design assumptions. We present an approach to autonomy that seeks to maximize robustness rather than optimality on a specific task. Goal-driven autonomy involves recognizing possibly new problems, explaining what causes the problems, and autonomously generating goals to solve the problems. We present such a model within the MIDCA cognitive architecture and show that under certain conditions this model outperforms a less flexible approach to handling unexpected events.
Read more here: https://d1wqtxts1xzle7.cloudfront.net/78474698/CS-TR-5029-libre.pdf?1641843822=&response-content-disposition=inline%3B+filename%3DGoal_Reasoning_Papers_from_the_ACS_works.pdf&Expires=1733798968&Signature=Wa15zurF8Z5Il1LfDsT9-1U4oalZHtE7FL7IKK3Zm5jbSexZDuHYlzDYygC1uBurtg5hH53wuUW4yF5ya46USYa~JNA5uJjPb6H8XE7NQOMqIsPw2YfGOBD~k~AGOEXVGmxU7CXznRH8WuiBDbgClbSOhMODGIAf4iCHoOXGeX~p7KQInZFkM4yNTcsnkxCG5Hf8ylY0rj4XVblULh48uauogSNjFb1XDpkbp7VET~fEi64fRJs8VqE3yi~vBjDAdoWz6HxDX~vCyCDX6Q2u3KB0vx7AS-lkaXGX~WZQ-AfJ5pL931cCSRYMYEhRmHdR14h2t42OZcg-ReueSgmPpg__&Key-Pair-Id=APKAJLOHF5GGSLRBV4ZA#page=82